(архив данного документа, 184 Кб)
МИНИСТЕРСТВО
ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
ДОНСКОЙ
ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра “Автоматизация производственных процессов”
МЕТОДИЧЕСКИЕ
УКАЗАНИЯ
к выполнению лабораторной работы
“Синтез закона управления методом желаемых
логарифмических амплитудо-частотных характеристик”
по дисциплине
“Синтез
законов управления в технических системах”
Ростов-на-Дону
Составители: Груздев В.В.
Артемов
А.А.
УДК 62-50 (075.5)
Методические указания к
выполнению лабораторной работы “Синтез закона управления методом желаемых
логарифмических амплитудо-частотных характеристик” по дисциплине “Синтез
законов управления в технических системах”./ДГТУ. Ростов-на-Дону, 2004, 16 c.
Являются руководством для
выполнения лабораторной работы по дисциплине “Синтез законов управления в
технических системах”. Работа посвящена изучению на практике метода синтеза
регуляторов по желаемых ЛАЧХ (в формулировке Солодовникова В.В.). Кроме того в
методических указаниях описывается программа AmLAHX,
реализующая данный метод. Указания
ориентированы на студентов очной формы обучения по специальностям 2101 и 2102,
но могут быть использованы для проведения работ со студентами других форм
обучения и специальностей.
Электронный вариант
настоящих методических указаний можно найти в сети InterNet по адресу http://download.2101.net.ru.
Печатается по решению
методической комиссии факультета “Автоматизация и информатика”.
Рецензент: д-р
техн. наук, проф., зав. каф. АПП ДГТУ В.Л. Заковоротный
Ó Издательский центр ДГТУ, 2004
Введение
Из всех частотных методов синтеза законов управления (ЗУ) наибольшее распространение получили методы на основе логарифмических амплитудно-частотных характеристик (ЛАЧХ). Это связано, с одной стороны, с трудностями математической трактовки формул частотных характеристик, громоздкостью и невысокой точностью графоаналитических методов на их основе, а с другой — удобством построения ЛЧХ и тем фактом, что они нашли широкое распространение в инженерной практике. Удобство применения ЛЧХ связано с их аддитивностью и амплитудных, и фазовых характеристик, но только для последовательно включенных звеньев. В связи с этим из методов синтеза по желаемым ЛЧХ нашли распространение только те методы, которые ориентировались на желаемые характеристики разомкнутой системы, среди которых наиболее известен метод желаемых ЛАЧХ Солодовникова В.В. Настоящие указания посвящены изучению этого метода на практике.
Выполнение работы
ориентировано на использование персонального компьютера, программных пакетов MatLab, SimuLink [3] и программы AmLAHX, c помощью
которой могут быть проведены все расчеты (необходимо использовать версию MatLab 6 [2] или более позднюю).
На выполнение
лабораторной работы отводится 4 учебных часа и 3-5 часов самостоятельной
работы.
1 Основные цели и задачи
работы
Целью лабораторной (ЛР)
является освоение методики синтеза регулятора условным объектом управления
(УОУ) по желаемым ЛАЧХ. В ходе выполнения ЛР необходимо решить следующие задачи:
— сформулировать критериальную стратегию синтеза;
— с помощью программы AmLAHX провести синтез регулятора;
— исследовать СУ с синтезированным регулятором.
2 Метод желаемых ЛАЧХ
2.1 Общие сведения
При линеаризованном описании передаточная функция (ПФ) разомкнутой системы (РС) — это произведение передаточных функций объекта управления (ОУ) и управляющего устройства (УУ). При этом ЛАЧХ разомкнутой системы представляет собой сумму характеристик объекта и регулятора, поэтому, имея ЛАЧХ желаемой разомкнутой системы и ЛАЧХ объекта, можно получить ЛАЧХ регулятора простым графическим вычитанием. Если компоненты математической модели системы управления представляют только минимально-фазовые звенья, то ЛЧХ этих звеньев имеют однозначную связь между фазовыми и амплитудными характеристиками и при синтезе можно ограничиться только одним видом характеристик.
Таким образом сущность метода желаемых ЛАЧХ состоит в следующем. По определенной методике строится желаемая амплитудная характеристика разомкнутой системы. На том же графике строится ЛАЧХ объекта управления, затем графическим вычитанием из ЛАЧХ разомкнутой системы ЛАЧХ объекта получим ЛАЧХ управляющего устройства, по которой определяется его передаточная функция. Для удобства построения перехода от ЛАЧХ к передаточной функции используются асимптотические ЛАЧХ.
Замечание. Метод желаемых
ЛАЧХ нельзя применять для синтеза регулятора объектом, ПФ которого содержит
неминимально-фазовые звенья.
2.2 Критериальная стратегия
синтеза и построение желаемой ЛАЧХ разомкнутой системы
Самым сложным этапом методики является построение желаемой ЛАЧХ РС на основании требований, предъявляемых к проектируемой системе управления (СУ), то есть КСС:
— желаемый
порядок астатизма ![]() , который
в свою очередь выбирается в зависимости от заданного критического воздействия и
статической точности;
, который
в свою очередь выбирается в зависимости от заданного критического воздействия и
статической точности;
— желаемый коэффициент усиления канонической
формы РС k![]() , рассчитываемый, исходя из требований к точности;
, рассчитываемый, исходя из требований к точности;
— желаемое время регулирования ![]() ;
;
—
перерегулирование
s![]() .
.
Желаемая характеристика РС рассматривается как совокупность НЧ, СЧ и ВЧ-областей, а также двух сопрягающих участков: НЧ и СЧ, СЧ и ВЧ.
НЧ-область ЛАЧХ — это прямая,
проходящая с наклоном ![]() через точку (lg w = 0, 20×lg k
через точку (lg w = 0, 20×lg k![]() ).
).
CЧ-часть — отрезок прямой, проходящей с
наклоном минус 20 дб/дек (в
исключительных случаях -40дб/дек) и пересекающей ось частот в точке ![]() . Концы отрезка — это концы диапазона допустимого отклонения
ЛАЧХ в СЧ-области (Dω,
Dl). Величина Dl определяется по специальным номограммам, исходя из
желаемого перерегулирования.
. Концы отрезка — это концы диапазона допустимого отклонения
ЛАЧХ в СЧ-области (Dω,
Dl). Величина Dl определяется по специальным номограммам, исходя из
желаемого перерегулирования.
ВЧ-часть строится из принципа минимальной сложности реализации, согласно которому эта часть должна быть параллельна ЛАЧХ ОУ в ВЧ-области.
Последним этапом построения желаемой ЛАЧХ РС является сопряжение НЧ- и СЧ-частей таким образом, чтобы максимально упростить вид итоговой желаемой ЛАЧХ.
3 AmLAHX —
программа синтеза регуляторов
методом желаемых ЛАЧХ
3.1 Общие сведения о программе
Программа AmLAHX предназначена для выполнения в среде MatLab 6 или выше и предоставляет пользователю
следующие возможности:
1. имеет графический интерфейс, отслеживает различные ошибки (случайные
или преднамеренные) в процессе работы (в том числе ошибки в исходных данных);
2. строит асимптотические ЛАЧХ динамических объектов, заданных в виде
передаточных функций;
3. строит в диалоговом режиме желаемую ЛАЧХ разомкнутой системы по
задаваемым критериям качества, в том числе, программа позволяет выбирать пользователю сопрягающие участки (их наклоны)
в зависимости от вида ЛАЧХ объекта управления;
4. обеспечивает автоматическое вычитание из ЛАЧХ разомкнутой системы
ЛАЧХ объекта управления и построение таким образом ЛАЧХ регулятора, результатом
своей работы возвращает сопрягающие частоты и наклоны асимптот ЛАЧХ регулятора
и его передаточную функцию;
5. все ЛАЧХ строятся с указанием наклонов асимптот, пользователь может
сам определять цвета каждой ЛАЧХ в отдельности, а также формат надписей на
графиках (толщина, высота).
Код программы открыт для свободного изменения. Скачать последнюю версию программы можно по адресу в сети Internet http://videvio.com/amlahx.
3.2
Алгоритм работы
В целом программа осуществляет расчеты по следующему алгоритму:
1. Анализ входных аргументов.
2. Формирование исходных данных (числителя и знаменателя ПФ ОУ) и свойств графиков и надписей в зависимости от режима работы.
3. Формирование массивов структур нулей и полюсов ПФ ОУ.
4. Поиск одинаковых нулей и полюсов и удаление соответствующих структур из массивов.
5. Поиск кратных нулей и полюсов и соответствующая оптимизация массивов структур.
6. Расчет астатизма, наклонов асимптот, коэффициента усиления канонической формы ПФ ОУ.
7. Объединение массивов структур нулей и полюсов, расчет сопрягающих частот и сортировка общего массива по возрастанию величины сопрягающих частот.
8. Построение асимптотической ЛАЧХ.
9. Выход из программы, если выбран 1-й режим работы
10. Ввод критериальной стратегии синтеза (КСС).
11. Получение дополнительной информации о желаемом качесте ЛАЧХ РС по КСС.
12. Построение низкочастотных, среднечастотных и высокочастотных частей ЛАЧХ РС в соответствии с КСС.
13. Ввод наклонов сопрягающих участков.
14. Оптимизация графика желаемой ЛАЧХ РС, исходя из накловно сопрягающих участков.
15. Сортировка сопрягающих частот ЛАЧХ ОУ и ЛАЧХ РС, корректировка дублирования частот и формирование массива структур, описывающего сопрягающие частоты и наклоны асимптот ЛАЧХ УУ.
16. Результат синтеза: график ЛАЧХ и ПФ управляющего устройства.
3.3
Командная строка
Полная командная строка для
запуска программы имеет вид
[src, yy, handles] = amlahx(flag, num, den, prm),
где flag — флаг режима
работы (этот и все последующие аргументы могут быть опущены): 1 - построение
только ЛАЧХ заданного объекта; 2 - синтез регулятора методом желаемых
асимптотических ЛАЧХ (по умолчанию); 3 - вызов меню в начале работы (интерактивный
режим);
num, den — соответственно вектора коэффициентов числителя и знаменателя
передаточной функции, начиная с коэффициента при старшей степени, степень (порядок)
полинома при этом равен количеству элементов вектора минус 1;
prm — структура свойств вида ЛАЧХ. Можно
управлять видом ЛАЧХ (цвет, толщина и другое), передав четвертым параметром
полную структуру свойств согласно примеру:
prm.oy.Color='red'; % цвет ЛАЧХ ОУ
prm.oy.LineWidth=1;
% толщина ЛАЧХ ОУ
prm.oy.pt='rp'; % тип соединительных точек в формате
'plot'
prm.rs.Color='red'; % цвет ЛАЧХ РС
prm.rs.LineWidth=1; % толщина ЛАЧХ РС
prm.rs.pt='ko'; % тип соединительных точек в формате
'plot'
prm.yy.Color='red'; % цвет ЛАЧХ УУ
prm.yy.LineWidth=2; % толщина ЛАЧХ УУ
prm.yy.pt=''; % тип соединительных
точек в формате 'plot'
amlahx(2,[1
0.2],[100 110 11 1 0],2,prm); % вызов
программы
src — структура, полностью описывающая асимптотическую ЛАЧХ ОУ;
yy — структура, полностью описывающая
синтезированную асимптотическую ЛАЧХ УУ;
handles—- вектор указателей на
созданные графические объекты.
AmLAHX без параметров работает в demo-режиме, в этом случае
num = [1 0.2], den = [100 110 11 1 0], flag = 2.
3.4 Режимы работы
AmLAHX имеет 3 режима работы
1. режим построения асимптотической ЛАЧХ ОУ;
2. режим синтеза регулятора (режим по
умолчанию);
3. интерактивный режим синтеза регулятора (основной режим).
Для запуска программы в
первом режиме в командной строке
MatLab следует набрать amlahx(1,num,den). В этом режиме программа строит только асимптотическую
ЛАЧХ объекта управления (рис 2). Возвращает программа массив структур src. Структуры описывают динамические звенья, из которых построен ОУ.
Каждая структура состоит из 9 полей:
— вещественная ans.a корня числителя или знаменателя;
— мнимая часть ans.b корня (под комплексно-сопряженную пару корней отводится 1 структура);
— кратность ans.krt;
— вид корня ans.vid (нуль (1) или полюс (-1));
— порядок ans.por корня (1 если корень вещественный, 2 – корень мнимый (то есть имеем
комплексно-сопряженную пару корней)):
— параметры динамического звена, имеющего такой корень или такую
комплексно-сопряженную пару корней: постоянная времени ans.T, колебательность ans.е,
частота среза ans.w, десятичный логарифм частоты среза ans.lgw.
Программа во 2-м и 3-м режимах
работы включает все возможности 1-го режима. Функционально 3-й режим отличается
от 2-го только возможностью интерактивно задать числитель и знаменатель ПФ ОУ,
а также параметры графиков, поэтому рассмотрим подробнее именно работу в 3-м
режиме на примере синтеза регулятора для объекта
![]() .
.
В командной строке MatLab набираем
amlahx(3,[1 0.2], [100 110 11 1 0]).
Сразу после запуска
программы появляется "Главное меню"
(рисунок 1). В надписях в этом и других окнах программы
буква 'я' заменена на 'ь' для
обеспечения совместимости с различными реализациями MatLab, некоторые из которых выдают ошибку при
наличии в коде букв 'я'. Меню формируется функцией k = umenu(Title, pos, xHeader, varargin), которая является модификацией поставляемой с MatLab функцией 'menu' и отличается от нее возможностью через
входные аргументы задавать заголовок Title и положение pos окна c меню.
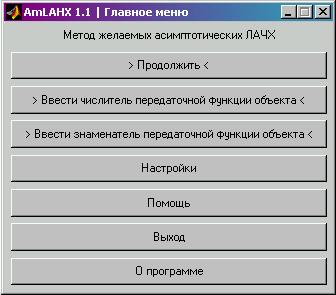
Рисунок 1 — Главное
меню AmLAHX
Опишем основные пункты меню.
Пункты 'Ввести числитель/знаменатель
передаточной функции объекта' дают
возможность ввести числитель и знаменатель в интерактивном режиме. Если на каком-то
шаге ввод будет прерван, а в командной строке в начале работы AmLAHX были переданы коэффициенты
числителя/знаменателя, то числитель/знаменатель все равно считается заданным.
При выборе этих пунктов открывается меню (рисунок 2).
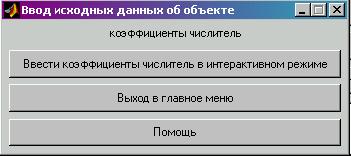
Рисунок 2 — Меню ввода исходных данных
При выборе первого пункта этого меню у пользователя запрашивается
порядок полинома, после чего открывает окно интерактивного ввода коэффициентов
полинома, реализуемого с помощью функции
[M, outstr] = uniinput(SM,
FStr, mflg, TUIStr, Req, MMVal),
которая входит в дистрибутив программы AmLAHX. Функция 'uniinput'
может быть использована отдельно
от AmLAHX в качестве удобного средства для ввода
матриц, векторов и полиномов. Для полинома 3 порядка вид окна приведен на рисунке
3.
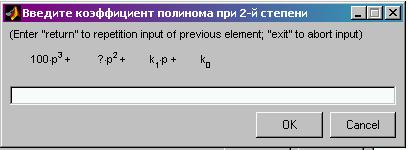
Рисунок 3 — Окно ввода коэффициентов полинома
Каждый коэффициент полинома вводится поочередно с отображением на
экране. Вводимому в данный момент коэффициенту соответствует знак '?'. Для повторного ввода в случае ошибки следует
набрать 'return'. Вывод на экран
полинома в привычном формате осуществляется путем присвоения свойству окна 'Interpreter'
значения 'tex' (использование для интерпретатора TeX для выводимых на экран сообщений). По окончании ввода полином выводится на
экран (рисунок 4).
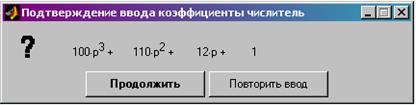
Рисунок 4 — Окно
подтверждения ввода коэффициентов полинома
Пункт главного меню 'Настройки' позволять задать цвета и толщину графиков при
условии, что в начале работы не был задан аргумент prm, в противном случае, все изменения в "Настройках" не
будут иметь силы. Начальные настройки читаются из файла 'amlahx.ini', причем, все внесенные изменения действуют
только в данном сеансе работы, поэтому, чтобы изменить начальные настройки, необходимо
отредактировать соответствующим образом файл 'amlahx.ini'.
Пункт 'Продолжить' — продолжение работы при условии, что через
меню или командную строку заданы полиномы числителя
и знаменателя ПФ ОУ, иначе выдается предупреждающее сообщение.
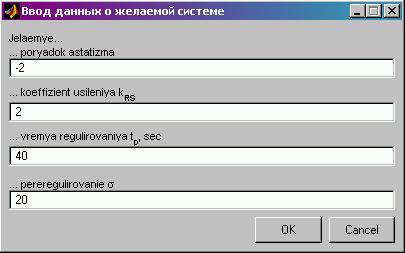
Рисунок 5 — Окно ввода параметров желаемой РС
После выбора пункта 'Продолжить' выполняется автоматическое построение ЛАЧХ ОУ
с указанием наклонов (см. рисунок 7). Если объект идеальный (порядок числителя
больше порядка знаменателя) пользователю предлагается остановиться и задать
реальный объект. В ходе расчетов программа находит кратные корни в числителе и
знаменателе, а также находит и удаляет одинаковые корни числителя и
знаменателя. Результатом расчетов является описанный выше массив структур spc.
После построения ЛАЧХ ОУ
открывается окно задания критериальной стратегии синтеза (рисунок 5). Задаем
степень астатизма ![]() = -2, желаемое время регулирования
= -2, желаемое время регулирования ![]() = 40 сек, коэффициент усиления РС k
= 40 сек, коэффициент усиления РС k![]() = 2, желаемое перерегулирование s
= 2, желаемое перерегулирование s![]() = 20 %.
= 20 %.
Далее по номограммам, исходя
из ![]() и s
и s![]() , пользователь должен указать желаемую частоту среза
, пользователь должен указать желаемую частоту среза ![]() (частота на которой
СЧ-часть желаемой ЛАЧХ пересекает ось частот) и допустимою величину отклонения
ЛАЧХ на СЧ-части Dl и Dφ.
В данном примере
(частота на которой
СЧ-часть желаемой ЛАЧХ пересекает ось частот) и допустимою величину отклонения
ЛАЧХ на СЧ-части Dl и Dφ.
В данном примере
![]() = 0.35
= 0.35 ![]() , Dl = ±20 дБ (рисунок 6).
, Dl = ±20 дБ (рисунок 6).

Рисунок 6 — Окно ввода параметров,
определяемых по номограммам
Программа выполняет
необходимые расчеты и строит НЧ- и СЧ-части желаемой ЛАЧХ с указанием наклонов,
после чего запрашивает у пользователя желаемый наклон отрезка, сопрягающего НЧ-
и СЧ-части. Выберем наклон -60 дБ/дек.
Заключительный этап работы
программы — вычитание из ЛАЧХ РС ЛАЧХ ОУ и получение таким образом ЛАЧХ УУ.
Этот этап состоит из двух шагов. Первый шаг — расчет массива структур yy, соответствующего ЛАЧХ
регулятора. Эти структуры описывают сопрягающие частоты и наклоны асимптот на
них. Каждая структура состоит из 5 полей:
— десятичный логарифм сопрягающей частоты ans.lgw;
— наклон асимптоты на этой частоте ans.nakl;
— порядок и вид динамического звена ans.por, соответствующего данной сопрягающей частоте
(например, если для сопрягающей частоты известно, что порядок динамического
звена равен 2, это означает, что это либо 2 пропорциально-дифференцирующих (ПД)
звена, либо ПД-звено 2-го порядка);
сопрягающая частота ans.w;
— постоянная времени динамического звена ans.T.
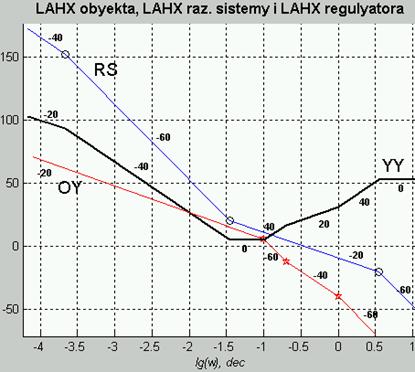
Рисунок 7 — Окно с построенными ЛАЧХ ОУ, РС и УУ
Второй шаг — по рассчитанной
структуре строится ЛАЧХ регулятора. На этом работа программы завершается. На
заключительном графике программа строит 3 ЛАЧХ: ОУ, РС, УУ с указанием наклонов
(рисунок 7) и в окне выводит ПФ синтезированного регулятора (рисунок 8).
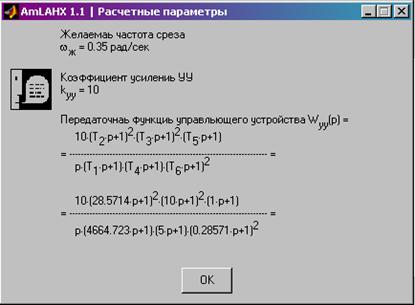
Рисунок 8 — Окно с информацией о
синтезированном регуляторе
4 Порядок выполнения работы
4.1 В соответствии с вариантом (п.5) записать ПФ УОУ в канонической форме.
4.2 Сформулировать критериальную стратегию синтеза (вид критического воздействия, точность его отработки проектируемой системой, коэффициент усиления РС, желаемое время регулирования, порядок астатизма и перерегулирование).
4.3 Воспользовавшись программой AmLAHX и ее описанием в п.3, осуществить синтез ЗУ УОУ в соответствии с КСС. Результатом синтеза должен быть график ЛАЧХ регулятора и его ПФ.
4.4 Построить структурную
схему системы управления УОУ с синтезированным регулятором в пакете SimuLink.
4.5 Построить переходный процессы реакции СУ на ступенчатое и заданное в КСС критическое воздействия. По графику реакции на "ступеньку" определить перерегулирование и время регулирования.
4.6 Сделать выводы по
результатам синтеза.
5 Варианты заданий
|
№ |
Передаточная функция УОУ |
|
1 |
|
|
2, 20 |
|
|
3 |
|
|
4, 21 |
|
|
5 |
|
|
6, 22 |
|
|
7 |
|
|
8, 23 |
|
|
9 |
|
|
10, 24 |
|
|
11 |
|
|
12, 25 |
|
|
13 |
|
|
14, 26 |
|
|
15 |
|
|
16, 27 |
|
|
17, 28 |
|
|
18, 29 |
|
|
19, 30 |
|
6 Содержание отчета
6.1 Название и цель работы.
6.2 Краткие сведения о методе желаемых ЛАЧХ.
6.3 ПФ УОУ, КСС.
6.4 Графики ЛАЧХ УОУ, желаемой РС и регулятора (из программы
AmLAHX).
6.5 ПФ регулятора.
6.6 Структурная схема СУ с синтезированным регулятором, набранная в
SimuLink.
6.7 Графики реакции СУ на "ступеньку" и критическое воздействие.
6.8 Выводы.
7 Контрольные вопросы
7.1 В чем преимущество
метода желаемых ЛАЧХ перед другими методами синтеза?
7.2 Какова сущность
метода желаемых ЛАЧХ?
7.3 Какие требования
предъявляются к системе управления при синтезе данным методом?
7.4 Укажите недостатки
метода желаемых ЛАЧХ и случаи, когда метод применять не следует.
7.5 Опишите процедуру
построения СЧ-области желаемой ЛАЧХ РС.
7.6 Расскажите, как по
асимптотической ЛАЧХ регулятора выписать его ПФ?
Библиографический список
1. Нейдорф Р.А., Обухов П.С. Синтез и оптимизация алгоритмов управления в технических системах: Учеб. пособие. Ч.2 — Ростов-н/Д: Издательский центр ДГТУ, 1997 94 с.
2. Дьяконов В.П. MatLab 6: учебный курс. — СПб.: Питер, 2001. — 592 с.: ил.
3. Дьяконов В.П, SimuLink 4. Спец. справочник. — СПб.: Питер, 2002.
Редактор А.А. Литвинова
ЛР №04779 от 18.05.01. В набор 01.01.04 . В печать 01.02.04 .
Объем . усл. п.л., . уч.-изд.л. Офсет. Формат 60x84/16.
Бумага тип №3. Заказ № 400 . Тираж 230 . Цена 4 р .
Издательский центр ДГТУ
Адрес университета и полиграфического предприятия:
344010, г.Ростов-на-Дону, пл.Гагарина,1.